
Page 70 - bilgem-teknoloji-dergisi-13
P. 70
RADAR TEKNOLOJİLERİ
BİLGEM TEKNOLOJİ
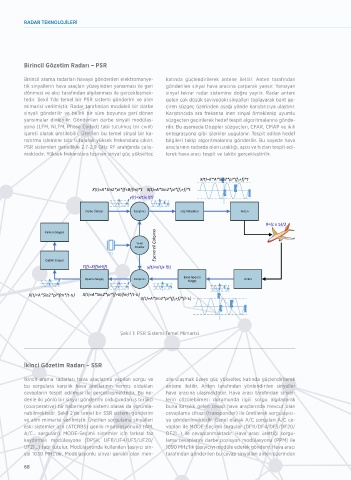
Birincil Gözetim Radarı – PSR
Birincil arama radarları havaya gönderilen elektromanye- katında güçlendirilerek antene iletilir. Anten tarafından alıcıya ulaşarak önce güç seviyesi ayarlanır. Sonrasında ve iz üretim algoritmalarına tabi tutulur. Bu sayede hava
tik sinyallerin hava araçları yüzeyinden yansıması ile geri gönderilen sinyal hava aracına çarparak yansır. Yansıyan de-modülasyona tabi tutularak 60 MHz’lik ara frekansa, araçlarının radardan olan uzaklığı, açısı ve hızları tespit
dönmesi ve alıcı tarafından algılanması ile gerçekleşmek- sinyal tekrar radar sistemine doğru yayılır. Radar anteni daha sonra da logaritmik detektörden geçirilerek temel edilmektedir. Buna ek olarak hava araçlarından gelen ce-
tedir. Şekil 1’de temel bir PSR sistemi gönderim ve alım gelen çok düşük seviyedeki sinyalleri toplayarak bant ge- bant seviyesine indirilir. Bu aşamadan sonra veri örnekle- vaplarda var olan kimlik, yükseklik ve daha ileri seviyede
mimarisi verilmiştir. Radar tarafından modüleli bir darbe çiren süzgeç üzerinden aşağı yönde karıştırıcıya ulaştırır. nerek sayısal sinyallere geçilerek korelasyon, birleştirme bilgiler edinilmektedir.
sinyali gönderilir ve belirli bir süre boyunca geri dönen Karıştırıcıda ara frekansa inen sinyal örneklenip uyumlu gibi işlevlere tabi tutulur. Son olarak üretilen veriler hedef
yansımalar dinlenilir. Gönderilen darbe sinyali modülas- süzgeçten geçirilerek hedef tespit algoritmalarına gönde-
yona (LFM, NLFM, Phase Coded) tabi tutulmuş bir cıvıltı rilir. Bu aşamada Doppler süzgeçleri, CFAR, CMAP ve ikili
y=sinx, x R 0*t)
y
işareti olarak üretilebilir. Üretilen bu temel sinyal bir ka- entegrasyona gibi işlemler uygulanır. Tespit edilen hedef X(t)=K*A*Sin (2*pi*± f
rıştırma işlemine tabi tutularak yüksek frekanslara çıkılır. bilgileri takip algoritmalarına gönderilir. Bu sayede hava f 0=1030 MHz X(t)=A*Sin(2*pi*± f 0*t) A
PSR sistemleri genellikle 2.7-2.9 GHz RF aralığında çalış- araçlarının radarda olan uzaklığı, açısı ve hızları tespit edi- O 2 π x
maktadır. Yüksek frekanslara taşınan sinyal güç yükselteç lerek hava aracı tespit ve takibi gerçekleştirilir. y y=cosx, x R
π x
O 2A
Sorgulama AM & DPSK
Modulasyon Modülatör Güç Yükselteci Anten
Sinyalleri
y y=sinx, x R +f)*t
X(t)=K*A*Sin2*pi*(f 0 Sorgulama
Genlik Modulasyonu
X(t)=A*Sin2*pi*(f+B/fm)*t X(t)=A*Sin2*pi*(f 0+f)*t O A π 2 x Kalman Süzgeci Osilator Farksal Faz Kaydırma Modulasyonu
Yerel
y y=cosx, y(t)=x(t)x l(t) y y=cosx, x R Y1 R=(c x (ԏ-tp))/2
2A
x R
π x
O x π O 2A
Darbe Üreteci Karıştırıcı Güç Yükselteci Anten Yerel Darbe Konum Cevap
Korelator, Osilator
Birleştirici Y3 Modulasyonu
R=(c x ԏ)/2 V=k*P in
Kalman Süzgeci Logaritmik Demodulator Ön Alıcı Anten
Yerel Detector y y=cosx, x R 2A y y=cosx, x R 2A y y=cosx, x R
π
π x
Osilator Eşevereli Çalışma O x O π x O 2A
Y1 X(t)=A*Sin2*pi*f m*(t-ԏ) X(t)=A*Sin2*pi*f 0*(t-ԏ) y y=sinx, x R
Çoğaltı Süzgeci f m=60 MHz f 0=1090 MHz A
Y(f)=X(f)xH(f) y(t)=x(t)x l(t) O 2 π x
y y=cosx, x R 2A Uyumlu Süzgeç Karıştırıcı Band Geçiren Anten
Süzgeç
O π x y O y=cosx, x R 2A y O y=cosx, x R 2A y O y=cosx, x R 2A X(t)=R*A*Sin (2*pi* f 0*t)
π x
x
π
π x
X(t)=A*Sin2*pi*fm*(t-ԏ) X(t)=A*Sin2*pi*(f+B/fm)*(t-ԏ) y y=sinx, x R
X(t)=A*Sin2*pi*(f 0+f)*(t-ԏ) Şekil 2 SSR Sistemi Temel Mimarisi
A
O 2 π x
Şekil 1: PSR Sistemi Temel Mimarisi
TÜBİTAK BİLGEM Hava
Trafik Kontrol
İkinci Gözetim Radarı – SSR Sistemleri
Milli Gözetim Radarı (MGR), DHMİ
İkincil arama radarları hava araçlarına yapılan sorgu ve zile ulaşmak üzere güç yükselteç katında güçlendirilerek
bu sorgulara karşılık hava araçlarının vermiş oldukları antene iletilir. Anten tarafından yönlendirilen sinyaller ve TÜBİTAK BİLGEM iş birliğiy-
cevapların tespit edilmesi ile gerçekleşmektedir. Bu ne- hava aracına ulaşmaktadır. Hava aracı tarafından sinyal- le ülkemizde milli imkânlar ile
denle iki yönlü bir sinyal gönderimi olduğundan iş birlikçi lerin çözülebilmesi durumunda ilgili sorgu algılanarak geliştirilen ilk Hava Trafik Kontrol
(coorperative) bir haberleşme sistemi olarak da yorumla- buna karşılık gelen cevap hava araçlarında mevcut olan Radarıdır. MGR prototipi 2015
nabilmektedir. Şekil 2’de temel bir SSR sistemi gönderim cevaplama cihazı (transponder) ile üretilerek sorgulayıcı- yılında tamamlanmış ve TÜBİTAK
ve alım mimarisi verilmiştir. Üretilen sorgulama sinyalleri ya gönderilmektedir. Genel olarak A/C sorguları A/C ce- Gebze Yerleşkesinde kurulmuştur
eski sistemler için (ATCRBS) genlik modülasyonuna (AM, vapları ile MODE-Seçimli sorgular (DF11/DF4/DF5/DF20/ (Şekil-3).
A/C… sorguları), MODE-Seçimli sistemler için farksal faz DF21…) ile cevaplanmaktadır. Hava aracı ürettiği sorgu-
kaydırmalı modülasyona (DPSK, UF11/UF4/UF5/UF20/ lama cevaplarını darbe pozisyon modülasyonu (PPM) ile
UF21…) tabi tutulur. Modülasyonda kullanılan taşıyıcı sin- 1090 MHz’lik taşıyıcıyı modüle ederek gönderir. Hava aracı
yal 1030 MHz’dir. Modülasyonlu sinyal gerekli olan men- tarafından gönderilen bu cevap sinyalleri anten üzerinden Şekil 3: Gebze Milli Gözetim Radarı (MGR)
68 69