
Page 80 - bilgem-teknoloji-dergisi-13
P. 80
RADAR TEKNOLOJİLERİ
BİLGEM TEKNOLOJİ
Dr. Ercan Kara - Uzman Araştırmacı, Ufuk Ülüğ - Başuzman Araştırmacı / BİLGEM BTE
Pasif radarlar; Pasif Uyumlu Konumlandırma (Passive Co- ile yansıyan işaretin zaman farkları t_doğrudan-t_yansı-
herent Localization - PCL) ve pasif verici takibi (Passive yan=(R_T+R_S-L)/c bulunur. Verici ve alıcı arasındaki me-
Emitter Tracking - PET) olmak üzere iki grupta incelene- safe, L bilindiği için, bistatik menzil toplamı (R_T+R_S)
bilir. PCL tekniği, ortamda bulunan FM, TV, GPS veya iş hesaplanır. Bu menzil toplamı odak noktaları verici ve alıcı
birlikçi bir sinyalden faydalanarak, hedeften yansıyan işa- olan turuncu elips şeklini oluşturur. (Şekil2a). Hedefin bu
retin doğrudan gelen işarete göre gecikmesi hesaplanır elips üzerinde olması gereklidir. Farklı verici-alıcı çiftleri
ve hedef konumlandırması yapılır. Elektromanyetik dalga kullanılarak elde edilen elipsler kesiştirilerek hedef konu-
PASİF
mu bulunabilir (Şekil2b).
yayılma hızı (c) dikkate alınarak, doğrudan gelen işaret
RADARLAR
laşan düşman uçakları için gözcü olarak kullanılabilece-
ğinden bahsedilen makale aslında pasif radarın çalışma
prensibini de açıklıyordu.
Herhangi bir yayın yapmadan sadece ortamdaki sinyalleri (a) (b)
kullanarak hedef konum tespiti yapan pasif radarları Al-
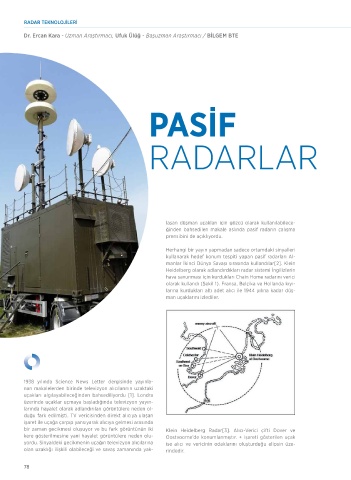
manlar İkinci Dünya Savaşı sırasında kullandılar[2]. Klein (a) PCL yönteminde bistatik menzil elipsi (b) Elipslerin kesiştirilerek hedef konumunun bulunması
Heidelberg olarak adlandırdıkları radar sistemi İngilizlerin
hava savunması için kurdukları Chain Home radarını verici
olarak kullandı (Şekil 1). Fransa, Belçika ve Hollanda kıyı-
larına kurdukları altı adet alıcı ile 1944 yılına kadar düş- PET yöntemi ise sinyal varış zaman farkına (Time Diffe- üçüncü bir alıcı eklersek, 3 farklı zaman farkı ve üç farklı
man uçaklarını izlediler. rence Of Arrival, TDOA) dayanmaktadır. Senkron iki alı- hiperbol elde edebilir. Bu hiperbollerinde kesişimi hedefin
cının tespit ettiği sinyalden zaman farkı t_alıcı1- t_alıcı2 konumunu verecektir. Alıcı sayısı artırılarak hedefin 3 bo-
=(R_1-R_2)/c (Şekil3a) şeklinde kestirilir. Bu zaman far- yutlu konumu da bu yolla bulunabilecektir. Ayrıca, TDOA
kının oluşturduğu menzil farkı, (R_1-R_2), ise iki boyutlu ve yön bulma tekniklerinin birlikte kullanılmasıyla hibrit
düzlemde hedefinde üzerinde bulunduğu bir hiperbole yöntemler de gerçekleştirilebilir.
denk gelmektedir. Bu sisteme Şekil3b’de gösterildiği gibi
1938 yılında Science News Letter dergisinde yayınla-
nan makalelerden birinde televizyon alıcılarının uzaktaki
uçakları algılayabileceğinden bahsediliyordu [1]. Londra
üzerinde uçaklar uçmaya başladığında televizyon yayın-
larında hayalet olarak adlandırılan görüntülere neden ol-
duğu fark edilmişti. TV vericisinden direkt alıcıya ulaşan
işaret ile uçağa çarpıp yansıyarak alıcıya gelmesi arasında
bir zaman gecikmesi oluşuyor ve bu fark görüntünün iki Klein Heidelberg Radar[3]. Alıcı-Verici çifti Dover ve
kere gösterilmesine yani hayalet görüntülere neden olu- Oostvoorne’de konumlanmıştır. + işareti gösterilen uçak
yordu. Sinyaldeki gecikmenin uçağın televizyon alıcılarına ise alıcı ve vericinin odaklarını oluşturduğu elipsin üze-
olan uzaklığı ilişkili olabileceği ve savaş zamanında yak- rindedir. (a) (b)
(a) Zaman farklarından elde edilen hiperboller (b) Hiperbollerin kesiştirilmesi
78 79